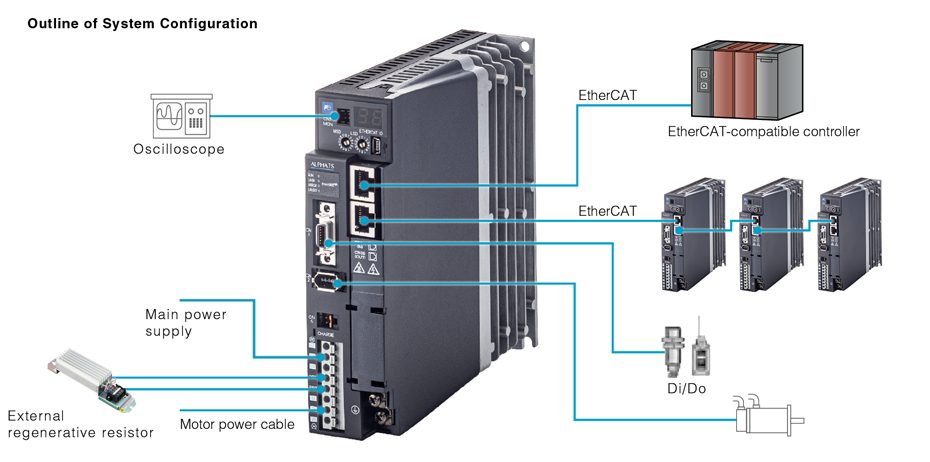
Amplifier type
RYT□□□S7-V△S2 |
101 |
201 |
401 |
751 |
851 |
132 |
182 |
292 |
442 |
| Outer frame number |
Frame 1 |
Frame 2a |
Frame 2b |
Frame 3 |
Frame 4 |
| Mass [kg] |
0.8 |
0.8 |
0.8 |
1.8 |
1.5 |
1.5 |
2.5 |
2.5 |
3.8 |
| Protective construction/cooling |
Open/natural cooling |
Open/mechanical cooling |
Power
supply |
Main
power
supply |
Number
of phases |
Single-phase, 3-phase |
3-phase |
| Voltage/frequency |
200 to 240VAC, 50/60Hz |
Allowable voltage
fluctuation |
3-phase: 170 to 264VAC, Single-phase: 190 to 264VAC |
Control
Power
supply |
Number
of phases |
None |
| Voltage/frequency |
Allowable voltage
fluctuation |
| Control system |
Fully-digital sinusoidal PWM drive |
| Overload capacity |
Overload capability varies from motor to motor |
Regenerative resisto
Max voltage [W] |
Built-in resistor |
- |
- |
- |
20 |
20 |
20 |
30 |
30 |
60 |
External resistor
(Note 1) |
17 |
17 |
17 |
50 |
50 |
50 |
260 |
260 |
300 |
| Dynamic brake |
Built-in |
| Feedback |
Absolute 24-bit/17-bit serial encoder, incremental 24-bit/17-bit serial encoder |
Speed fluctuation
ratio(Note 2) |
Load fluctuation |
Within ± 0.01% (load fluctuation 0 to 100% at rated operation speed) |
Power supply
fluctuation |
0% (power supply fluctuation -10% to +10% at rated operation speed) |
Temperature
fluctuation |
Within ± 0.2% (25°C ± 10%°C at rated operation speed when an analog voltage command is issued) |
| Performance |
Speed control |
Closed-loop control, acceleration time setting, manual feed speed/maximum rotation speed adjustment, speed command zero clamping, etc. by using a speed regulator |
Number of
position data points |
50points (position, speed, acceleration time, deceleration time, stop timer, M code output, and various statuses) |
| Position control |
Closed-loop control, electronic gear, output pulse setting, feed forward, homing, interrupt positioning, auto start, etc. by using a position regulator |
| Torque control |
Closed-loop control (proportional open-loop control for current and torque), torque limiting, speed limiting during torque control, etc. by using a current regulator |
| Ancillary features |
Easy tuning, pattern run, sequence test mode, auto tuning, auto notch filter, vibration suppression control online learning,
etc. |
| Protective functions (Alarm display) |
Over Current (oc1, oc2), Over Speed (oS), Overvoltage (Hv), Encoder Trouble (Et1, Et2), Control Circuit Error (ct), Memory Error (dE), Motor Combination Error (cE), Encoder Communication Error (Ec), CONT (Control signal) Error (ctE), Over Load (oL1, oL2, oL3), Main Power Low Voltage (LvP), Braking Resistor Overheat (rH1, rH2), Braking Transistor Error (rH3), Inrush Current Suppression Circuit Trouble (rH4), Deviation Overflow (oF), Amplifier Overheat (AH), Encoder Overheat (EH), Absolute Data Lost (dL1, dL2, dL3), Multi-turn Data Over Flow (AF), Initial Error (iE), Command Pulse Frequency Error (HF) |
Operation and display
section of main body |
5-digit alphanumeric display with 7-segment LED
4 operation switches (MODE, UP, DOWN, and SET) |
| Use Environment |
Installation place |
Indoors at altitude ≤ 1000 m, free from dust, corrosive gases and direct sunlight
In case of compliance with UL/CE marking: Pollution Degree = 2 Over Voltage Category = III |
Temperature/ humidity/
Atmospheric pressure |
0 to 55°C/10 to 90%RH (without condensation)/70 to 106 kPa |
| Vibration resistance |
3 mm: < 2 to 9 Hz 9.8 m/s2: < 9 to 20 Hz 2 m/s2: < 20 to 55 Hz 1 m/s2: < 55 to 200 Hz |
| Shock resistance |
19.6 m/s2 |
| Standards |
UL standard: UL61800-5-1
CE marking
Low voltage directive:EN61800-5-1
EMC directive:EN61800-3
KC |
Control
function |
Frequency response |
3,200 Hz |
| Tuning features |
Auto tuning, semi-auto tuning, interpolation control mode, trace operation mode, high-tact operation mode, custom tuning mode, manual tuning |
| Automatic adjustment features |
Tuningless features, easy tuning, fine tuning |
| Notch filter |
5-step |
| Damping control |
Uses only one point: Switchable at 4points; uses 2points simultaneously: Fixed at PA1_78 and PA1_80 (not switchable) |
| Compensation features |
Friction compensation, interference detection, cogging torque compensation |