Achieves even higher performance by combining high-speed motion control and high-precision data processing.
Launch of the SPH5000EC open-network EtherCAT-ready programmable controller designed for the new era.
5000EC・5000M
Scalability
A single CPU can be used to flexibly expand the system, ranging from ultra-high-speed multi-axis control to complex control of information.
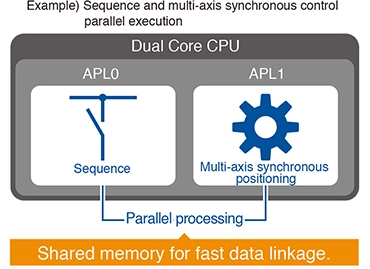
Run two unit’s worth of applications on a single CPU module
Conventional (two unit’s worth) PLC applications can be executed simultaneously in parallel on the newly developed multi-core platform.
Integrates complex control as a single controller
The controller can be configured to best suit the control application’s scale and required functions and performance. Furthermore, the system can be expanded as needed, reducing development and system costs.
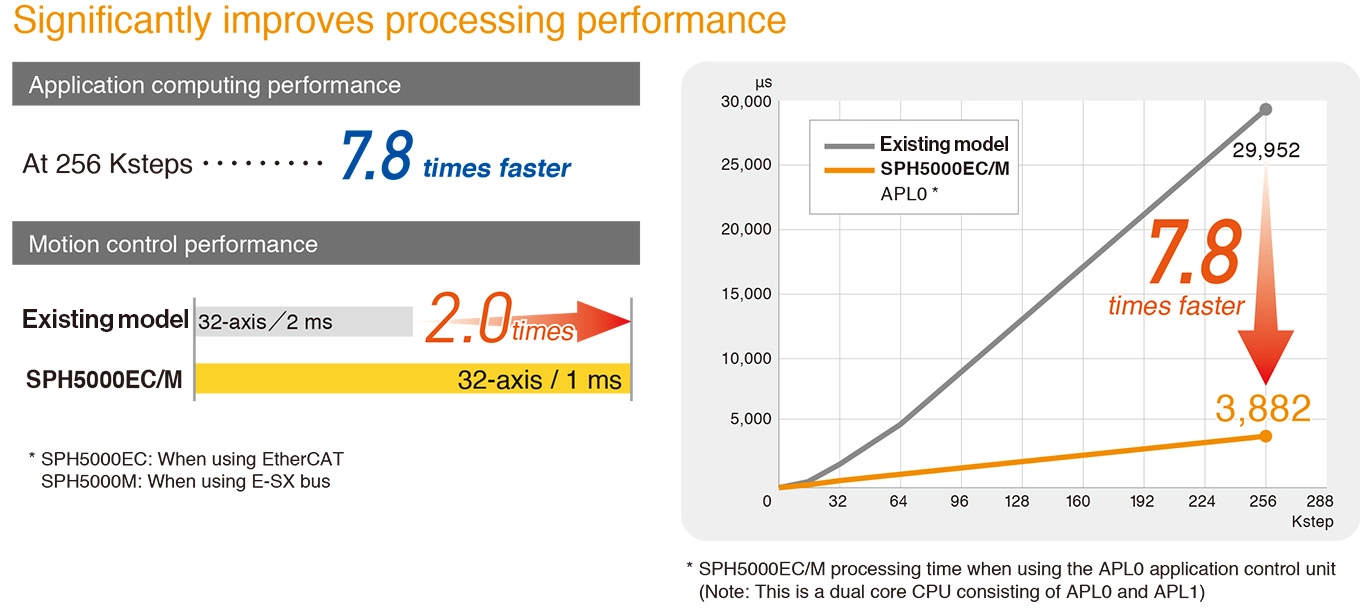
Significantly improves processing performance
5000EC・5000M
Compatibility
In addition to significantly improving functionality and performance, its high degree of compatibility enables use of existing hardware and software assets.
Enables reuse of both hardware and software
Can reuse SX common Expert (D300win) applications.
In addition, SPH common power supplies,I/O, functions, and communication modules can be used to easily replace or expand existing systems.
-
Note
-
SPH5000M is also compatible with Standard apps
5000EC・5000M
Reliability
Contributes to the construction of highly reliable systems that reduce risks by enhancing functionality in order to ensure stable operation of customer equipment.
Batteryless backup
The batteryless memory retention function enables data backup of retain memory and RAS information. This eliminates the need for regular-maintenance battery changes.
Note) A separate battery is required to back up the calendar IC.
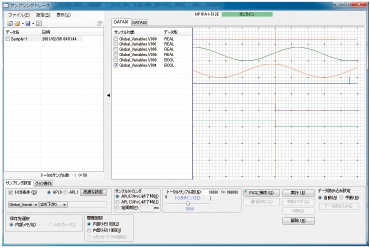
Sampling trace
Advanced sampling traces enable you to quickly solve problems during development and system operation.
-
Data collection does not affect the application execution cycle
-
Continuous collection of 10x worth of much data
-
Max. 64 points can be traced simultaneously
5000EC
EtherCAT COMMUNICATION
Compatible with EtherCAT, which combines high-speed and real-time performance, and enables the configuration of open field networks.
EtherCAT master
The SPH5000EC comes with EtherCAT ports on all sides of the module.
As an EtherCAT master, it can be connected to various EtherCAT slaves.
-
Note
-
EtherCAT is a real-time, industrial open network developed by Beckhoff Automation GmbH.
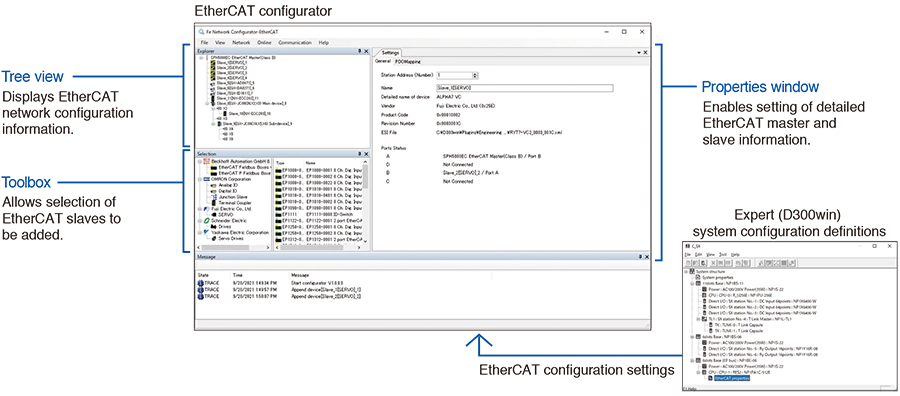
EtherCAT configurator
Enables configuration of EtherCAT network by starting the EtherCAT configurator from Expert (D300win).
-
Batch management of EtherCAT master and slave calibration with simple operations from the tree view
-
Enables flexible system configurations with Expert (D300win) and Fuji Electric original networks (SX bus, E-SX bus, T-LINK, etc.)
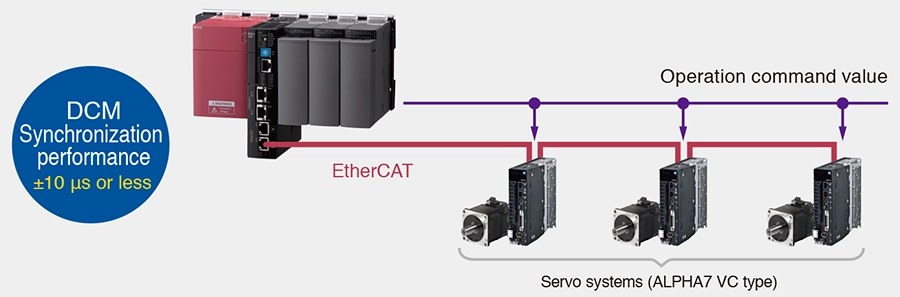
Synchronization control of Ether CAT
Synchronization in the bus
Synchronizes the data output timing between EtherCAT stations.
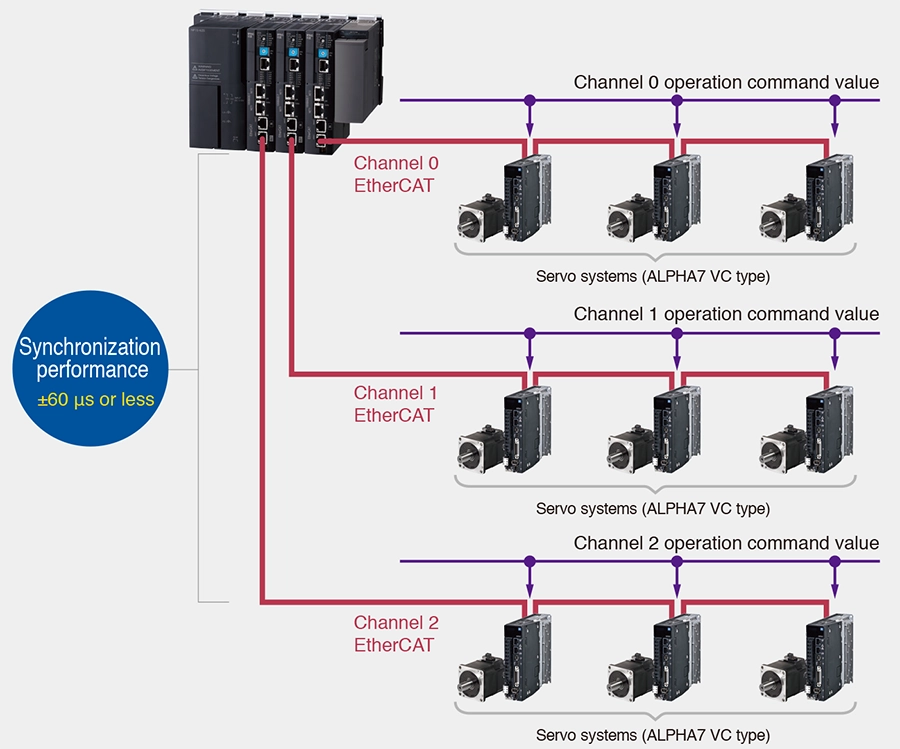
Synchronization between buses
Data output timing is synchronized between channels of the EtherCAT.
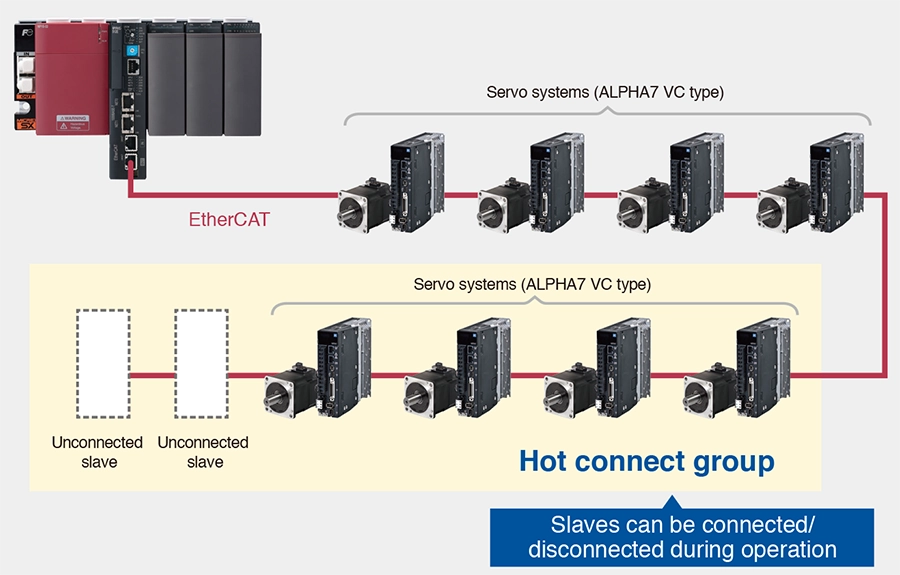
Connection function of the EtherCAT
Hot connect function
Slaves can be connected and disconnected while the SPH5000EC (EtherCAT master) is running.
Moreover, since the system can be configured to include unconnected slaves, it is possible to configure a system with a mix of required slaves and optional slaves to be added.
5000M
E-SX BUS COMMUNICATION
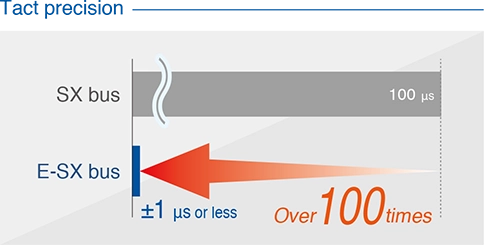
A complex motion control bus that achieves ultra-high-speed, high-precision synchronous communication and High-capacity data transfer.
Comparison of E-SX bus and SX bus function and performance
| Function and performance |
SPH3300/2200 |
SPH5000M/H |
| System bus |
SX bus |
SX bus |
E-SX bus |
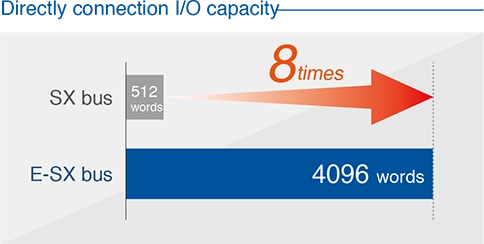
| Directly connection I/O capacity |
512word |
512word |
4096word |
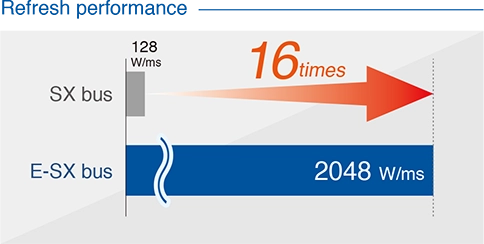
| Refresh performance |
128word/ms |
128word/ms |
2048word/ms |
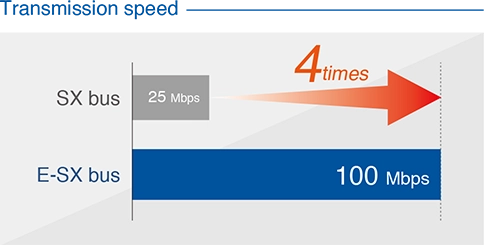
| Transmission speed |
25Mbps |
25Mbps |
100Mbps |
| Tact fluctuation |
100µs |
100µs |
±1µsor less |
| Inter-station synchronization |
None |
None |
Provided
(±1µs or less) |
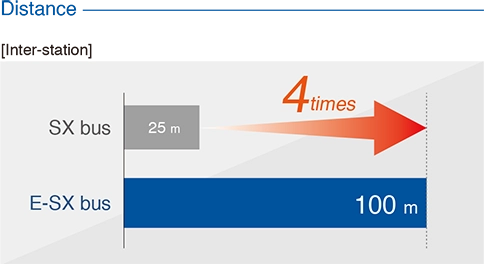
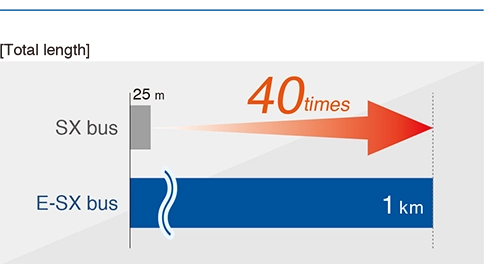
| Distance (Inter-station/total length) |
25m/25m |
25m/25m |
100m/1km |
Disconnection continuous
operation (loopback) |
None |
None |
Provided |
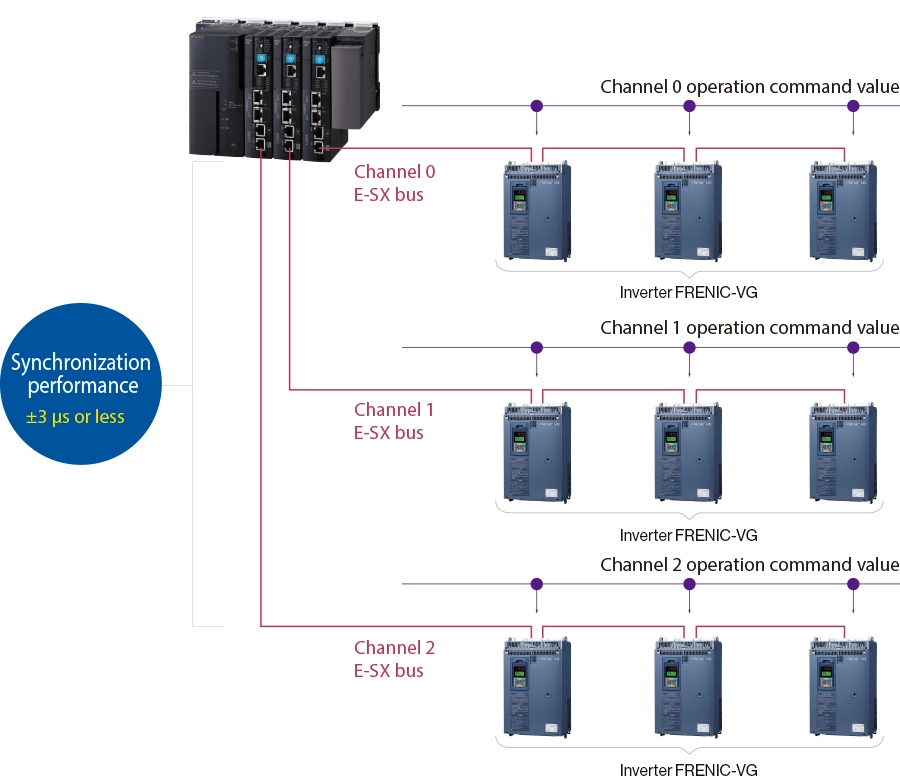
Connection function of the E-SX bus
Synchronization in the bus
Data output timing is synchronized in the E-SX bus.
Synchronization between buses
Data output timing is synchronized between channels of the E-SX bus.
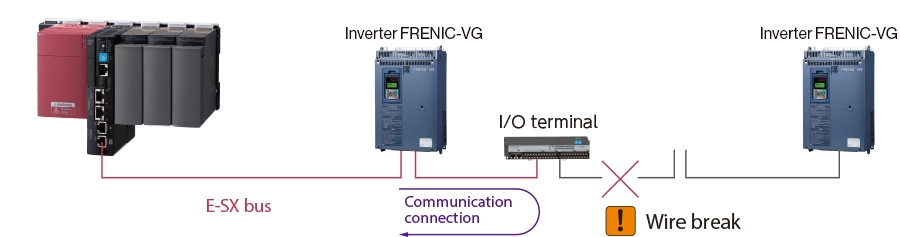
Connection function of the E-SX bus
Loopback function
Communication is continued by the signal repeater function even when a wire is broken.
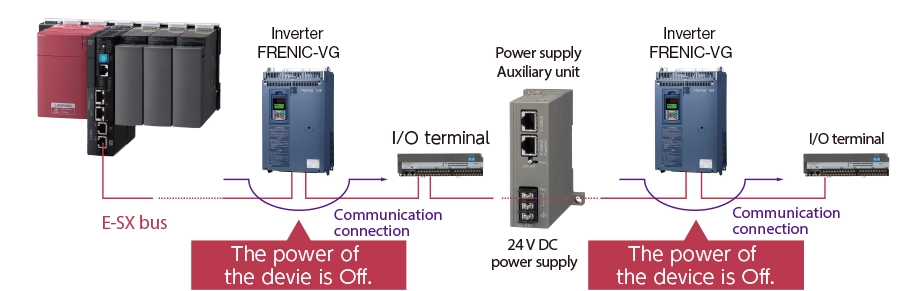
Signal bypass function
Even when a power of some devices is not turned on, the communication is continued by the auxiliary power unit.
5000EC・5000M
System Configuration Example
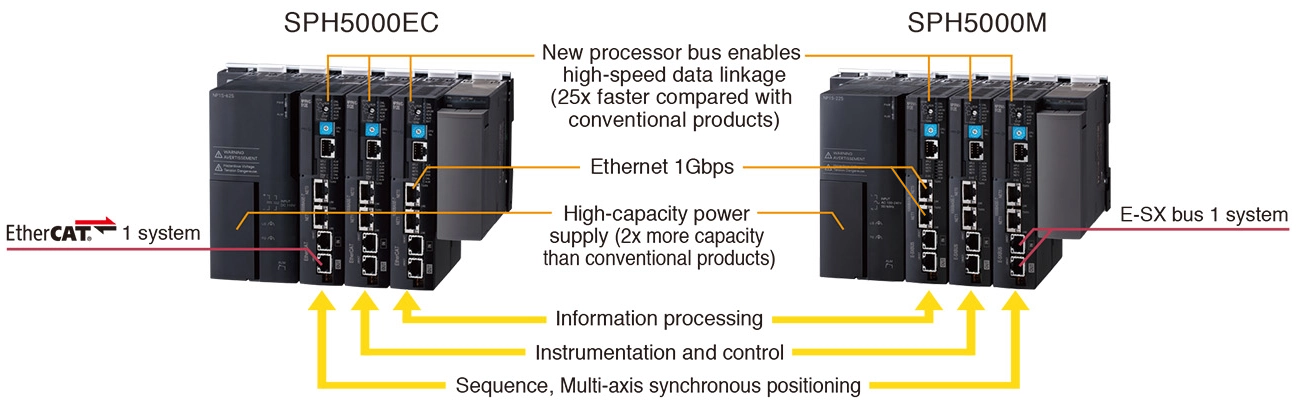
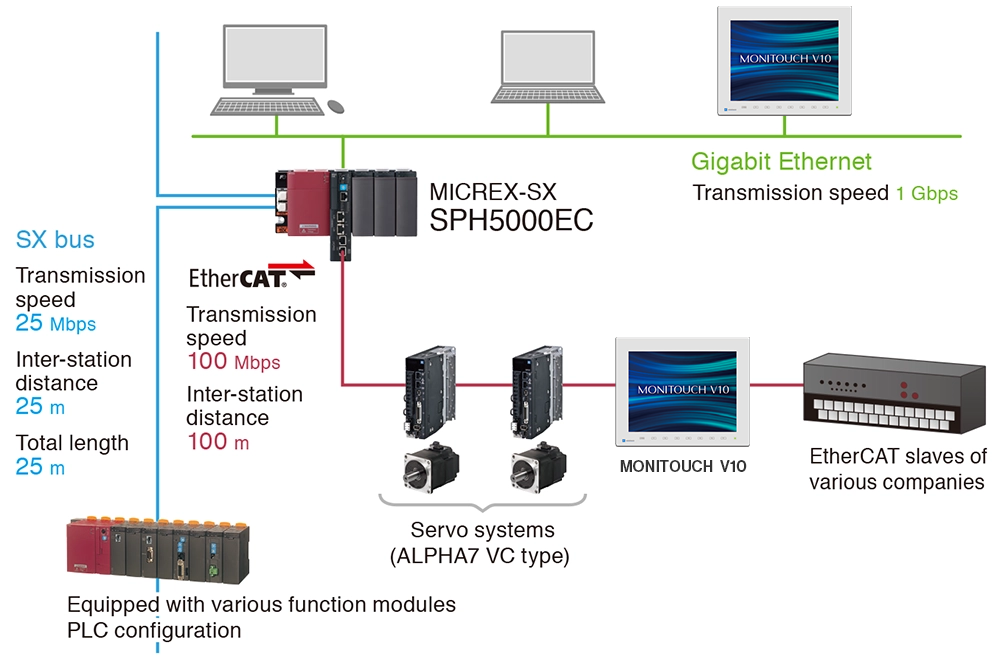
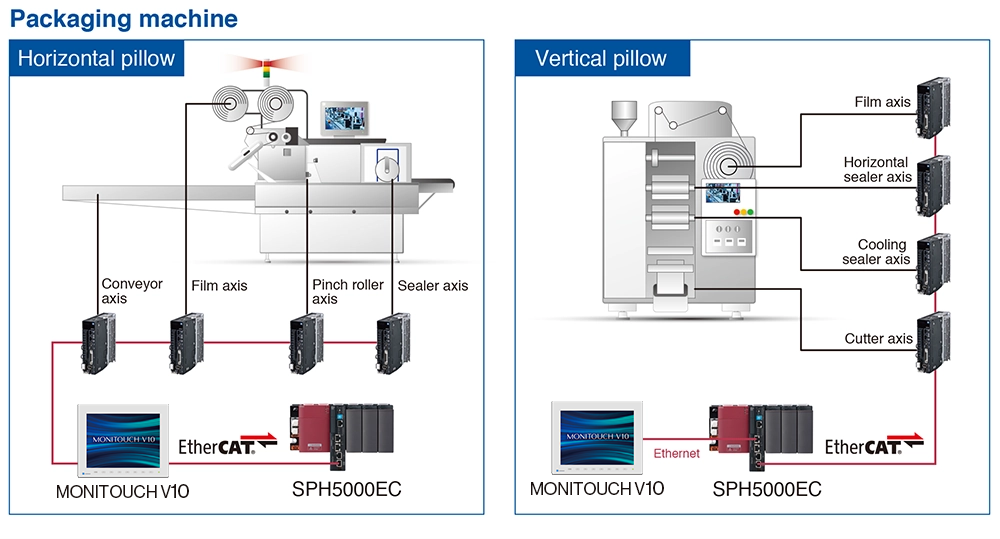
SPH5000EC
The SPH5000EC supports Gigabit Ethernet (1000BASE-T) for general purpose networks and EtherCAT and SX buses for field buses.EtherCAT compatibility enables the construction of open, high-speed, high-precision motion systems that connect various field devices.
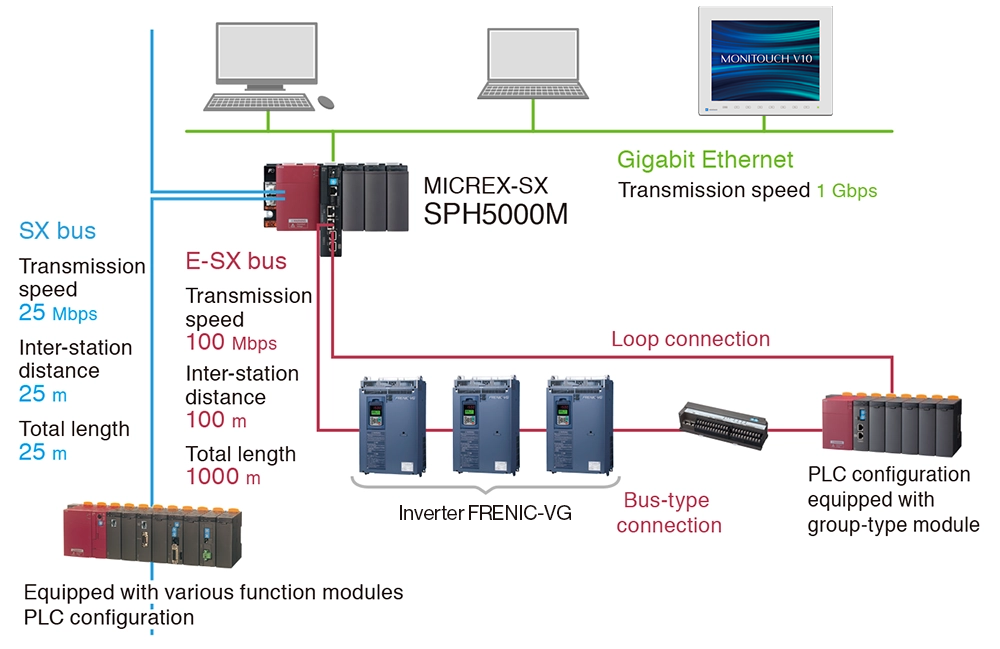
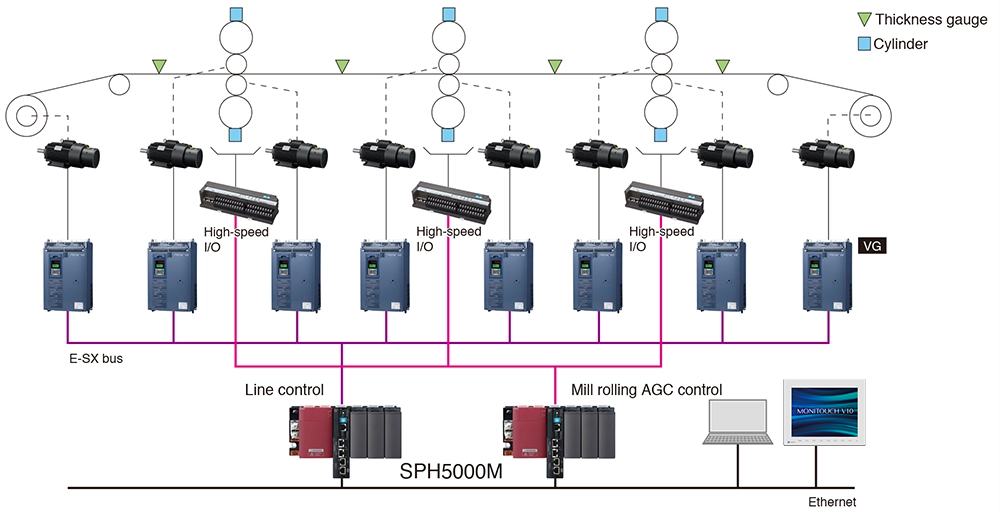
SPH5000M
The SPH5000M supports Gigabit Ethernet (1000BASE-T) for general purpose networks and E-SX and SX buses for field buses.Support for ultra-high-speed,high-precision E-SX buses enables high-capacity, highly reliable equipment and machine control.
5000EC・5000M
Case Study
SPH5000EC Packaging machine
SPH5000M Rolling line
5000EC・5000M
Motion Program (FB)
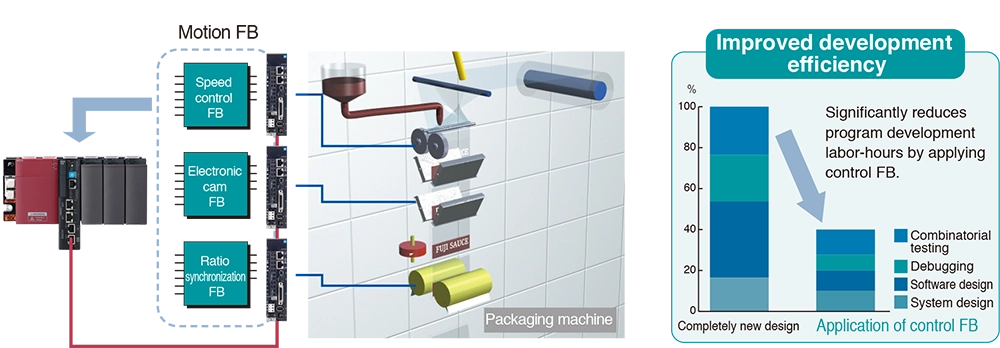
Provides a wide variety of motion programs (FB)
-
Various types of functional software (FB) are available.
-
Allows motion programs for large-scale systems to be built quickly by combining FBs.
-
Enables the functions required for the machinery to be freely set for each axis.There are no restrictions on the combination of motion functions (positioning, interpolation, synchronous operation, etc.).
-
Dramatically improves program development efficiency, debugging efficiency, and reliability by reusing functionally blocked FBs.
FB for various applications
| Control content |
FB name |
Function |
| SPH5000EC |
SPH5000M |
Number of control axes |
Content |
| Virtual main axis |
VM00_VM |
- |
Generates main axis pulses (reference signals for synchronization).
Used when the virtual main axis is utilized as the main axis. |
| PTP positioning |
VSC01_PTP |
VM01_PTP |
1-axis |
Performs PTP positioning. |
2-axis linear interpolation
2-axis circular arc |
VSC02_INTP |
VM02_INTP |
2-axis |
Performs linear interpolation and circular arc interpolation positioning using two servo axes.
There are two types of circular arc interpolation: the radius specification and center point specification methods.
It is also possible to perform PTP positioning for each axis. |
| Ratio synchronization |
VSC03_PSYNC |
VM03_PSYNC |
1-axis |
Performs PTP positioning and ratio synchronization.
The ratio can be changed at any time and the main axis can be reversed. |
Interval synchronization
(rotational) |
VSC04_RSYNC |
VM04_RSYNC |
1-axis |
Performs PTP positioning and rotary shear operation (interval synchronization/rotational).
In a rotary shear, operates continuously in one direction relative to the main axis pulse.
Used in synchronization where the length of each workpiece needs to be controlled because the phases of the main axis and the sub axis are controlled. |
Interval synchronization
(reciprocating) |
VSC05_FSYNC |
VM05_FSYNC |
1-axis |
Performs PTP positioning and rotary shear operation (interval synchronization/reciprocating).
In a flying shear, the operation is intermittent in a reciprocating manner relative to the main axis pulse.
After synchronization, it returns to its original position and waits for the next cycle. |
| Electronic cam operation |
VSC06_CAM |
VM06_CAM |
1-axis |
Performs PTP positioning and cam operation.
Operates with the registered cam pattern synchronized with the main axis.
Uses the cam pattern creation FB [VM07_CAMPTN] to create the cam pattern. |
| Cam pattern creation |
VM07_CAMPTN |
- |
Creates cam pattern data for electronic cam FB. |
| Speed control |
VSC08_VEL |
VM08_VEL |
1-axis |
Performs speed control.Used to control conveyors that do not require positioning, such as for constant speed operation and winding. |
| Torque control |
VSC09_TRQ |
VM09_TRQ |
1-axis |
Performs torque control. Used for constant control of tension and pressure. |
| Auxiliary FB |
Parameter
reading/writing |
VSCP100_PRM |
VMP100_PRM |
- |
Reads and writes parameters of ALPHA7. |
| Mark detection |
VSCP101_MARK |
- |
Performs mark measurement (length measurement of mark interval) and moving average processing as auxiliary functions when performing interval synchronization (rotational) positioning operation.
Used in combination with interval synchronization (rotational) FB [VSC04_RSYNC] (SPH5000EC).
Used in combination with interval synchronization (rotational) FB [VM04_RSYNC] (SPH5000M). |
| Phase adjustment |
VSP102_PHADJ |
- |
Performs phase adjustment as an auxiliary function when performing interval synchronization (rotational) positioning operation.
Used in combination with interval synchronization (rotational) FB [VSC04_RSYNC] (SPH5000EC).
Used in combination with interval synchronization (rotational) FB [VM04_RSYNC] (SPH5000M). |
| Alarm bit output |
VSCP103_ALM |
VMP103_ALM |
- |
Converts the alarm code output from FB to bits. |
-
Note
-
Applicable to ALPHA7 VC types
5000EC・5000M
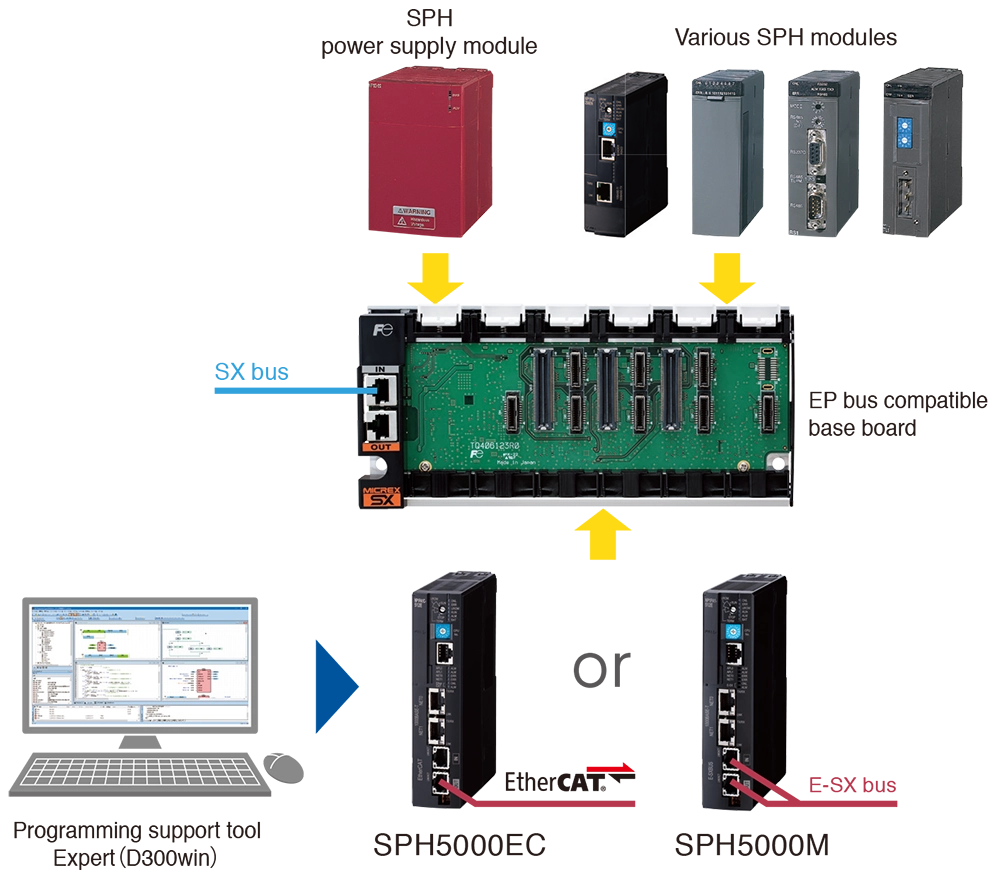
Programming Support Tools
Two Types of Programming Support Tools in Accordance with Development Style
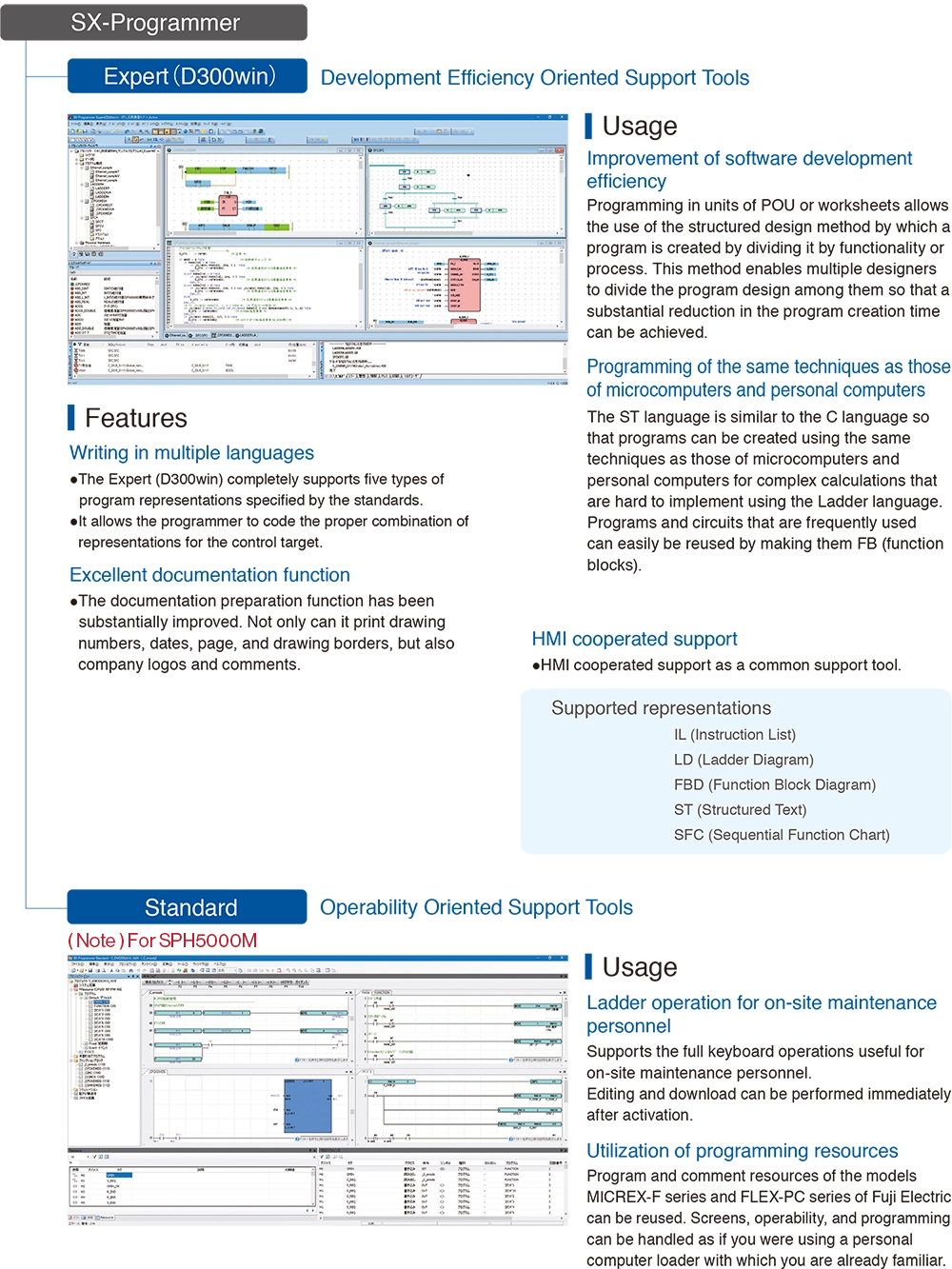
SX-Programmer
These are Windows-compatible programming support tools conforming to the IEC61131-3 International Standard.
5000EC・5000M
Specifications
SPH5000EC
| Type |
NP1PA1C-096E |
NP1PA1C-128E |
NP1PA1C-256E |
NP1PA1C-512E |
| Control system |
Stored program
Three types of tasks can be used: Default, fixed cycle, and event |
| I/O connection method |
Direct-connection I/O method (SX bus, EtherCAT) |
| I/O control system |
SX bus: CPU module fixed cycle refresh
Remote I/O link: Remote master fixed cycle refresh (not synchronized with scan)
EtherCAT: EtherCAT tact synchronization refresh |
| Task cycle bus specification |
Allows EtherCAT to be specified as a task synchronization bus |
| CPU |
32-bit RISC processor, dual core |
| Programming language |
IL, ST, LD, FBD, SFC, IEC61131-3 compliant (JIS B 3503) |
| Instruction execution time |
Sequence instruction |
Min. 4 ns / instruction |
| Application instruction |
LD WORD Min. 0.9 ns / instruction, ADD UDINT Min. 4 ns / instruction |
| Memory capacity |
Program memory
(shared by two app control units) |
96Kstep |
128Kstep |
256Kstep |
512Kstep |
| Data memory (Note1) |
Max. 1,840 Kwords |
Max. 3,184 Kwords |
Max. 6,144 Kwords |
| No. of I/O points |
SX bus |
512 words (Max. 8,192 points) |
| EtherCAT |
4,096 words (Max. 65,536 points) |
| Min. tact cycle |
SX bus |
1ms |
| EtherCAT |
0.5ms |
| Motion performance |
Single CPU system:Single unit configuration |
16-axis/0.5 ms, 32-axis/1 ms |
| Multi-CPU system:Three unit configuration |
48-axis/0.5 ms, 96-axis/1 ms |
| EtherCAT |
Transmission speed |
100Mbps |
| Transmission line format (Note2) |
Line, tree, and star types |
| EP bus |
Transmission speed |
5Gbps |
| Access performance |
0.15 μs/word ( Other station memory at 1-word write) |
| 0.04 μs/word ( Other station memory at 16-word write) |
| Ethernet port |
1 Gbps: 1000BASE-T 1 port |
| USB port |
480 Mbps: USB2.0 1 port |
| User ROM |
SD memory card, SDHC memory card |
| Memory backup |
Batteryless backup using non-volatile memory, and battery backup of calendar IC Battery (NP8P-BT) is optional |
| Available data types |
Basic data types: BOOL, INT, UINT, DINT, UDINT, REAL, TIME, DATE, TOD, DT, STRING, WORD, DWORD |
| Data type nesting |
1-level Array of arrays, array of structures, structure of arrays, structure of tructures |
| Number of members of structure data type |
200 |
| Number of elements of array data type |
16-bit length data types: 32,768 items, 32-bit length data types: 16,384 items |
| Number of tasks |
Default tasks (cyclic scan): 2 (1 x 2 application control units)
Fixed-cycle tasks: 8 (4 x 2 application control units)
Event tasks: 8 (4 x 2 application control units)
Can use 4 fixed-cycle and event tasks in total for each application control unit |
-
Note1
-
This is the total value of the areas that can be shared by the two app control units and the areas that can be used by each app control unit.
-
Note2
-
Enables tree and star configurations by using EtherCAT branch slaves.
SPH5000M
| Type |
NP1PA1-096E |
NP1PA1-128E |
NP1PA1-256E |
NP1PA1-512E |
| Control system |
Stored program
Three types of tasks can be used: Default, fixed cycle, and event |
| I/O connection method |
Direct-connection I/O method (SX bus, E-SX bus) |
| I/O control system |
SX bus: SX bus tact synchronization refresh or CPU module fixed cycle refresh
Remote I/O link: Remote master fixed cycle refresh (not synchronized with scan)
E-SX bus: E-SX bus tact synchronization refresh or CPU module fixed cycle refresh |
| Task cycle bus specification |
Specify either SX bus or E-SX bus for the task cycle bus |
| CPU |
32-bit RISC processor, dual core |
| Programming language |
IL, ST, LD, FBD, SFC, IEC61131-3 compliant (JIS B 3503) |
| Instruction execution time |
Sequence instruction |
Min. 4 ns / instruction |
| Application instruction |
LD WORD Min. 0.9 ns / instruction, ADD UDINT Min. 4 ns / instruction |
| Memory capacity |
Program memory
(shared by two app control units) |
96Kstep |
128Kstep |
256Kstep |
512Kstep |
| Data memory(Note) |
Max. 1,840 Kwords |
Max. 3,184 Kwords |
Max. 6,144 Kwords |
| No. of I/O points |
SX bus |
512 words (Max. 8,192 points) |
| E-SX bus |
4,096 words (Max. 65,536 points) |
| Min. tact cycle |
SX bus |
1ms |
| E-SX bus |
0.25 ms (bus connection) 0.5 ms (loop connection) |
| Motion performance |
Single CPU system:Single unit configuration |
4-axis/0.25 ms, 16-axis/0.5 ms, 32-axis/1 ms |
| Multi-CPU system:Three unit configuration |
12-axis/0.25 ms, 48-axis/0.5 ms, 96-axis/1 ms |
| E-SX bus |
Transmission speed |
100Mbps |
| Transmission line format |
Can specify bus connection or loop connection |
| EP bus |
Transmission speed |
5Gbps |
| Access performance |
0.15 μs/word ( Other station memory at 1-word write) |
| 0.04 μs/word ( Other station memory at 16-word write) |
| Ethernet port |
1 Gbps: 1000BASE-T 2 port |
| USB port |
480 Mbps: USB2.0 1 port |
| User ROM |
SD memory card, SDHC memory card |
| Memory backup |
Batteryless backup using non-volatile memory, and battery backup of calendar IC
Battery (NP8P-BT) is optional |
| Available data types |
Basic data types: BOOL, INT, UINT, DINT, UDINT, REAL, TIME, DATE, TOD, DT, STRING, WORD, DWORD |
| Data type nesting |
1-level Array of arrays, array of structures, structure of arrays, structure of structures |
| Number of members of structure data type |
200 |
| Number of elements of array data type |
16-bit length data types: 32,768 items, 32-bit length data types: 16,384 items |
| Number of tasks |
Default tasks (cyclic scanning) : 1
Fixed cycle tasks: 4
Event tasks: 4
Total of fixed cycle tasks and event tasks: 4 |
-
Note
-
This is the total value of the areas that can be shared by the two app control units and the areas that can be used by each app control unit.
5000EC・5000M
Lineup
SPH5000EC
| Product name |
Type
(Product code) |
Specification and name |
CPU
module |
NP1PA1C-096E |
Program memory
96Kstep |
User ROM/USB/Ethernet compatible
Max. number of I/O points 73,728
EtherCAT port 1-system
RS-422 port 1-system for maintenance |
Accessories:
Instruction manual,
SX bus terminating plug (2x) ,
driver ( for CPU No. settings) ,
battery holder |
Sequence instruction
Min. 4 ns |
| NP1PA1C-128E |
Program memory
128Kstep |
| NP1PA1C-256E |
Program memory
256Kstep |
| NP1PA1C-512E |
Program memory
512Kstep |
SPH5000M
| Product name |
Type
(Product code) |
Specification and name |
CPU
module |
NP1PA1-096E |
Program memory
96Kstep |
User ROM/USB/Ethernet compatible
Max. number of I/O points 73,728
E-SX bus port 1-system
RS-422 port 1-system for maintenance |
Accessories:
Instruction manual,
SX bus terminating plug (2x) ,
driver ( for CPU No. settings) ,
battery holder |
Sequence instruction
Min. 4 ns |
| NP1PA1-128E |
Program memory
128Kstep |
| NP1PA1-256E |
Program memory
256Kstep |
| NP1PA1-512E |
Program memory
512Kstep |
SPH5000EC/5000M Common components
| Product name |
Type
(Product code) |
Specification and name |
EP bus compatible
baseboard |
NP1BE-06 |
For 6-slot |
Processor bus: 3 slots
Number of SPH5000M supported slots: 3 slots |
Accessories:
Base board, mounting
brackets |
| NP1BE-08 |
For 8-slot |
| NP1BE-11 |
For 11-slot |
| NP1BE-13 |
For 13-slot |
| NP1BX-13 |
For 13-slot |
Processor bus: 10 slots
Number of SPH5000M supported slots: 3 slots |
Large-capacity power
supply module |
NP1S-22S |
Input: 100 to 240 V AC, Output: 70 W |
Accessories:
ALM contact connector |
| NP1S-62S |
Input: 110 V DC, output: 70 W |