FRENIC-MEGA (G1)
Maklumat produk | Menampung pelbagai aplikasi
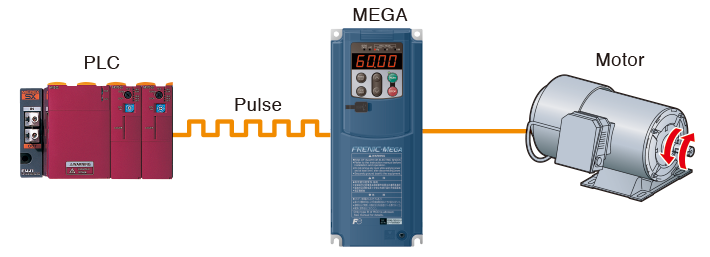
Adalah mungkin untuk mengeluarkan arahan kelajuan dengan input kereta api nadi (nadi fasa tunggal dan tanda nilai arahan) daripada penjana nadi, dsb.
(Kekerapan input nadi maksimum: 100kHz)
Operasi nisbah adalah fungsi yang sangat mudah untuk melaraskan dua atau lebih sistem pengangkutan. Nisbah kelajuan paksi utama kepada dua atau lebih paksi mengekor boleh ditetapkan sebagai arahan frekuensi. Pada mesin yang mengendalikan variasi beban seperti mesin pengangkut, kelajuan pengangkut boleh dilaraskan dengan mudah.

Inverter melindungi perintang brek dengan memantau operasi transistor brek. Inverter mengeluarkan isyarat khusus untuk pengesanan kegagalan transistor brek. Litar untuk mematikan bekalan kuasa input mesti disediakan di luar penyongsang. Apabila isyarat ini dikeluarkan, kuasa dimatikan; sekali gus melindungi litar brek.
Kebolehpercayaan isyarat brek telah ditingkatkan untuk kegunaan seperti pengangkutan menegak.
Secara konvensional, nilai semasa dan kekerapan telah dipantau apabila isyarat brek dikeluarkan. Dengan menambah nilai tork pada kedua-dua nilai ini, pemasaan brek boleh dilaraskan dengan lebih mudah.
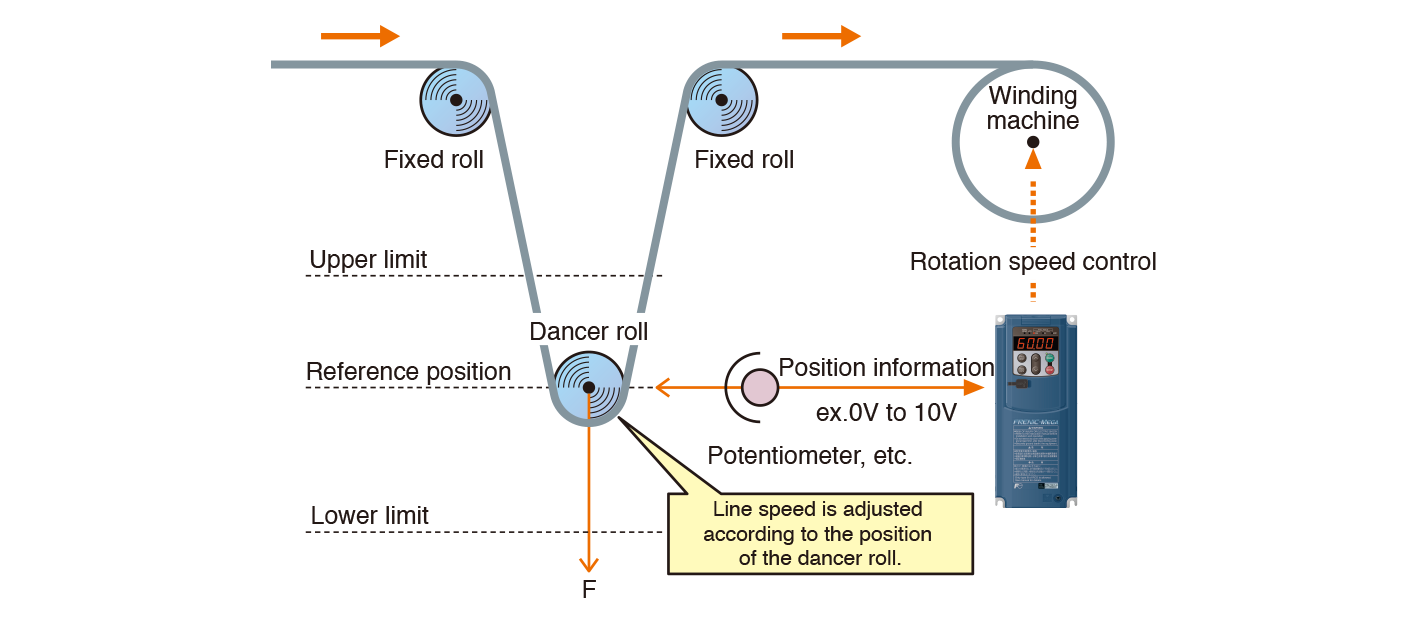
Nilai PID, dikira dengan membandingkan nilai sasaran dan nilai maklum balas, ditambah atau ditolak daripada kelajuan rujukan. Memandangkan keuntungan kalkulator PID (dalam julat berkadar) boleh ditetapkan kepada nilai yang rendah, penyongsang boleh digunakan pada sistem kawalan automatik yang memerlukan tindak balas pantas seperti pengawal kelajuan.
(1) Input analog: input voltan melalui 2 terminal dengan kekutuban, input arus melalui 1 terminal (2) Fungsi henti aras kadar alir perlahan (Operasi bertekanan mungkin sebelum operasi kadar alir perlahan berhenti.) (3) Corak V/f bukan linear pada 3 titik (4) Fungsi output kegagalan dummy (5) Pemilihan 4 motor (6) Pecutan/decel bentuk S. tetapan julat (7) Mengesan pemutusan sambungan maklum balas PID
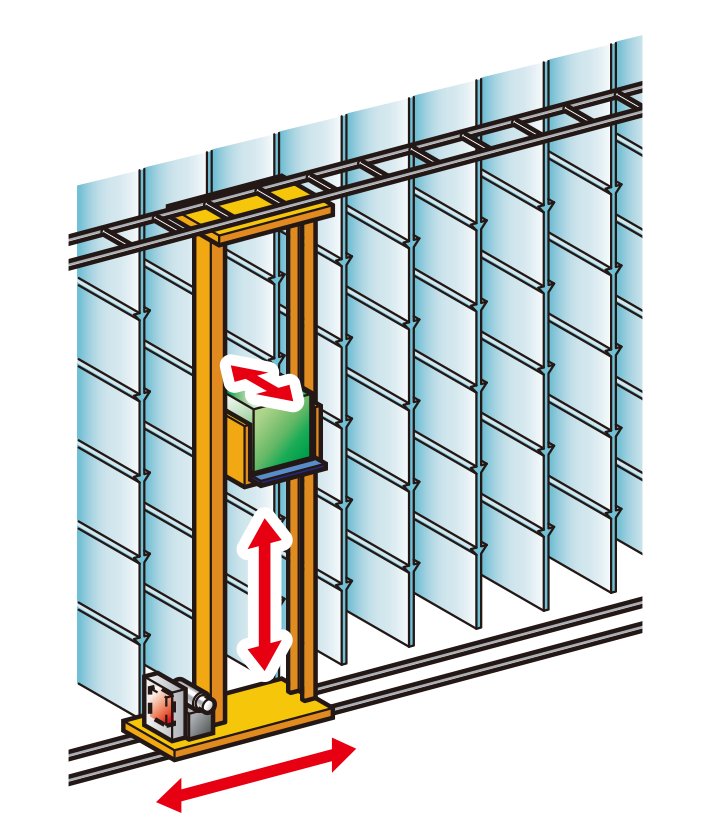
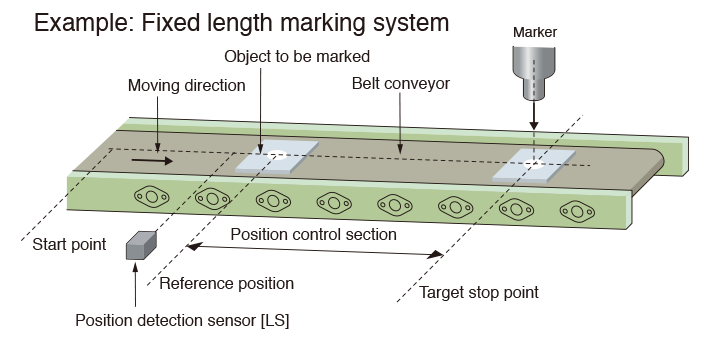
Fungsi kawalan ini paling sesuai untuk aplikasi yang memerlukan kedudukan yang sangat tepat seperti mesin pengangkut. Dengan penggunaan gabungan gelung kawalan kedudukan (APR) dan kawalan vektor PG, ketepatan kawalan kedudukan telah dipertingkatkan dengan ketara. Masa penentududukan yang dipendekkan oleh fungsi ini akan membantu mengurangkan masa kebijaksanaan kitaran.
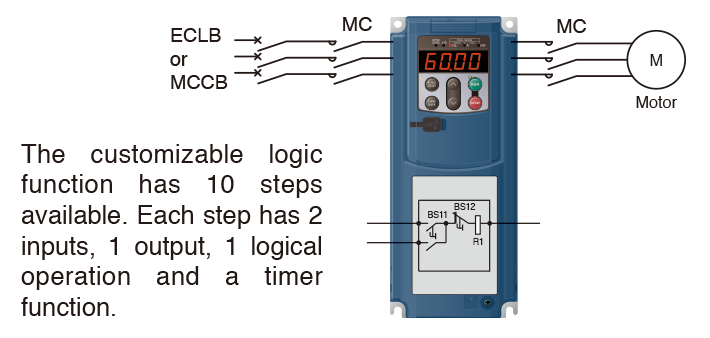
Input/output logik boleh dibuat dengan mudah dengan tetapan parameter.
Ini memungkinkan untuk memudahkan litar persisian.
Fungsi ini memegang kedudukan semasa aci motor apabila motor dihentikan di bawah kawalan vektor dengan penderia kelajuan. Fungsi ini berguna apabila tork digunakan secara luaran atau menahan tork diperlukan semasa masa berhenti.













